















 358 / 397
358 / 397

Механики XXI веку. № 16 2017 г.
358
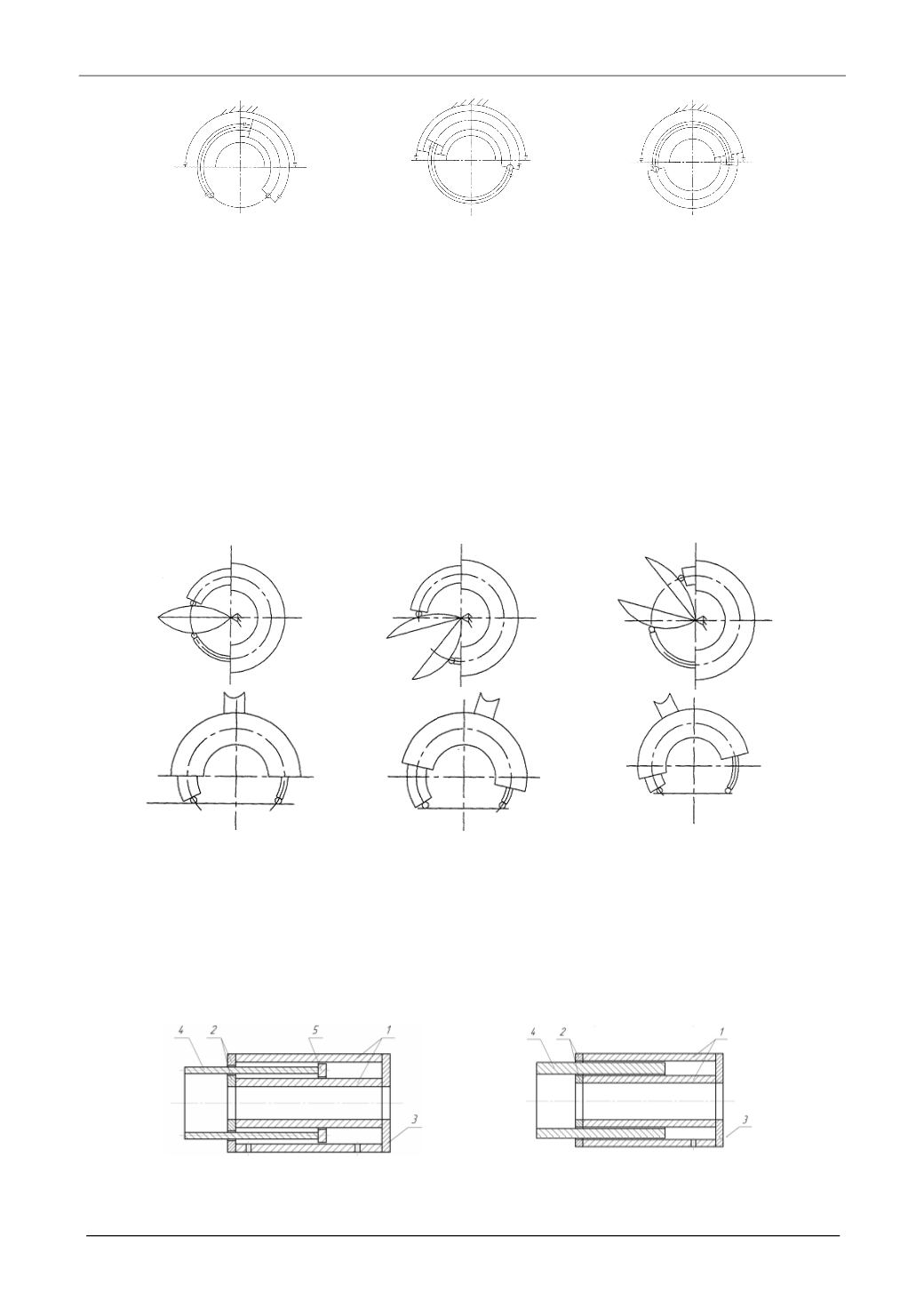
Рис. 5. Возможные варианты работы телескопического кругового гидроцилиндра
Описываемый гидроцилиндр может использоваться в конструкции многофунк-
циональных гидрофицированных машин, а также роботов и манипуляторов, например, в
качестве гидромеханической руки (Рис.5), по простоте имеющей преимущества перед
известными зажимами, широко используемыми в роботизированных производственных
системах [3].
Кроме этого, этот гидроцилиндр может использоваться в летательных и плава-
тельных гидрофицированных аппаратах, что отмечено в работе [4] в качестве привода
многофункциональных рулей, в том числе высоты, направления и крена, состоящих из
двух несущих подвижных поверхностей, которые могут поворачиваться раздельно и
вместе, как одно целое (Рис. 6).
Аналогично – в качестве элемента ходового оборудования шагающих машин, ма-
нипуляторов и роботов - гидромеханической стопы с одним или несколькими располо-
женными параллельно заявляемыми гидроцилиндрами (Рис.6).
Рис. 6. Возможные варианты использования телескопического кругового
гидроцилиндра в конструкции объектов машиностроения
Определённый интерес представляют полые гидроцилиндры, например, по Патенту
РФ №2596679 (Рис. 7), используемые в качестве несущей оболочечной конструкции пере-
менной длины, внутри которой могут располагаться какие-либо коммуникации, например, в
качестве несущей телескопической конструкции переменной длины гидрофицированных
грузоподъёмных, землеройных, копровых, электромонтажных и прочих технических систем,
включая медицину и металлургию.
Рис. 7. Принципиальные схемы полых гидроцилиндров двухстороннего и одностороннего действия