















 201 / 397
201 / 397

Современные технологии и автоматизация в машиностроении
201
где
i
l
1
– сумма длин прямолинейных участков;
i
i
i
R
1
сумма длин криволинейных
участков;
i
R
радиус кривизны осевой линии трубопровода на
i
-участке;
i
угол изгиба
на
i
-участке.
Исходные геометрические параметры и данные по конфигурации узла трубопровода
можно получить двумя способами:
измерив эталон-трубопровод с помощью современных контрольно-измерительных
машин (рис. 2). Данный способ наиболее подходит для внедрения системы на этапе серийно-
го изготовления двигателей ЛА;
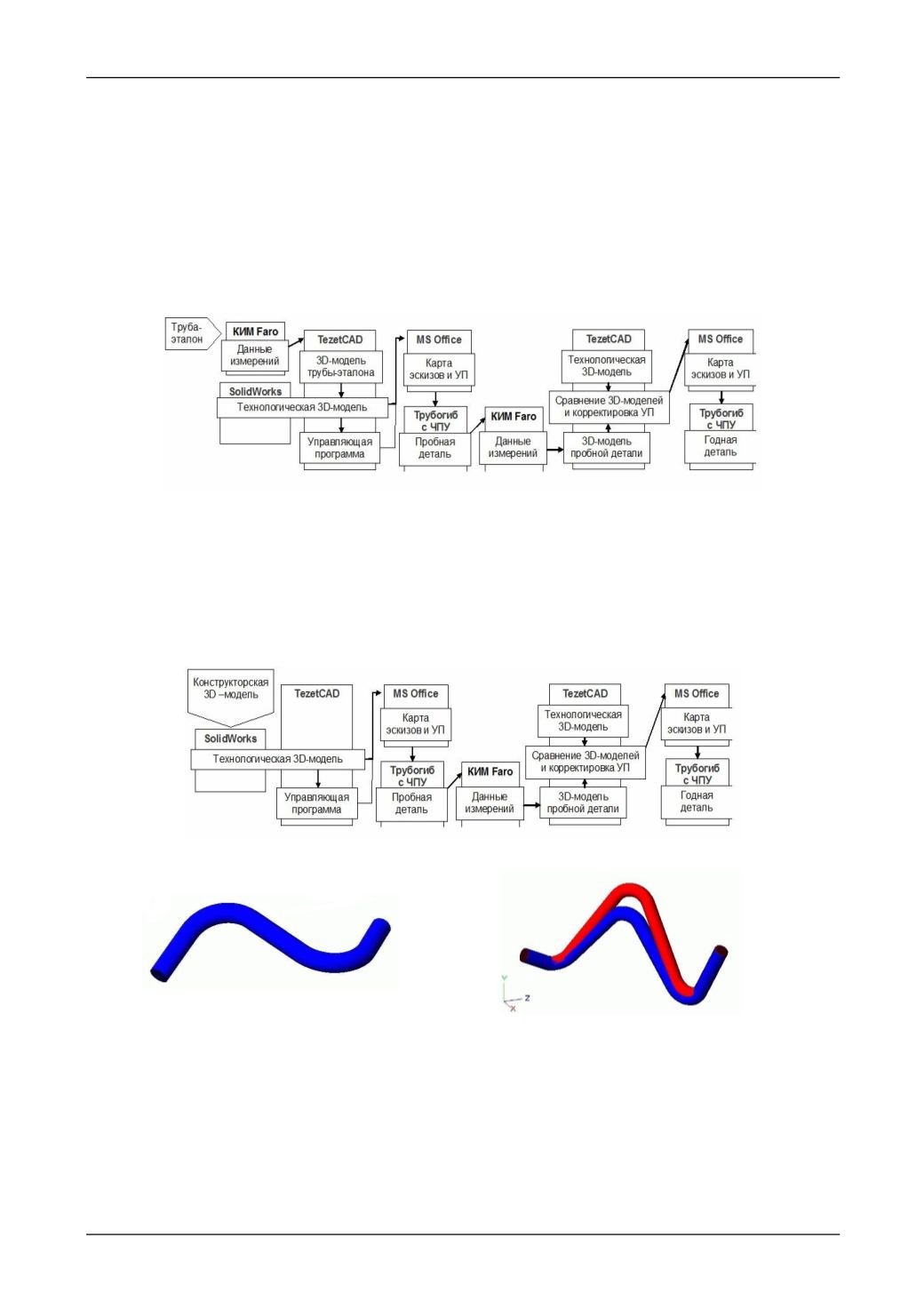
Рис. 2. Алгоритм работы системы (вариант 1)
получив геометрические параметры трубопровода из созданной конструктором
3D-модели двигателя (при этом необходимо корректировать координаты мест стыковки пу-
тем их измерения контрольно-измерительной машиной и внесения соответствующих изме-
нений в 3D-модель) (рис. 3, рис. 4). Этот способ предназначен для внедрения автоматизиро-
ванной системы на этапе отработки (освоения) производства современных изделий, посколь-
ку они проектируются с применением 3D моделирования.
Рис. 3. Алгоритм работы системы (вариант 2)
Рис. 4. 3D-модель трубопровода
Рис.5. Графическое представление результатов изме-
рения изготовленного трубопровода
в сравнении с эталонной 3D-моделью
На следующем этапе необходимо создать управляющую программу (УП) для осуще-
ствления гибки трубы на станке с числовым программным управлением, для чего может ис-
пользоваться специальное технологическое программное обеспечение (например,
TezetCAD). Затем данные управляющей программы необходимо внести в блок управления
станка с ЧПУ для осуществления гибки трубы с последующим контролем конфигурации при
помощи КИМ (путем сравнения исходной 3D-модели и данных, полученных в процессе из-