















 287 / 397
287 / 397

Конструкции, технические и эксплуатационные свойства транспортных средств
287
4) возможность ввода новых моделей и переменных коэффициентов для описания ра-
боты элементов колебательной системы;
5) получение статистических характеристик входных и выходных процессов и частот-
ных характеристик звеньев и системы в целом;
6) оценка степени нелинейности звеньев и колебательной системы в целом при вводе
новой модели;
7) оценка точности и адекватности моделируемых процессов и исследуемых колеба-
тельных систем.
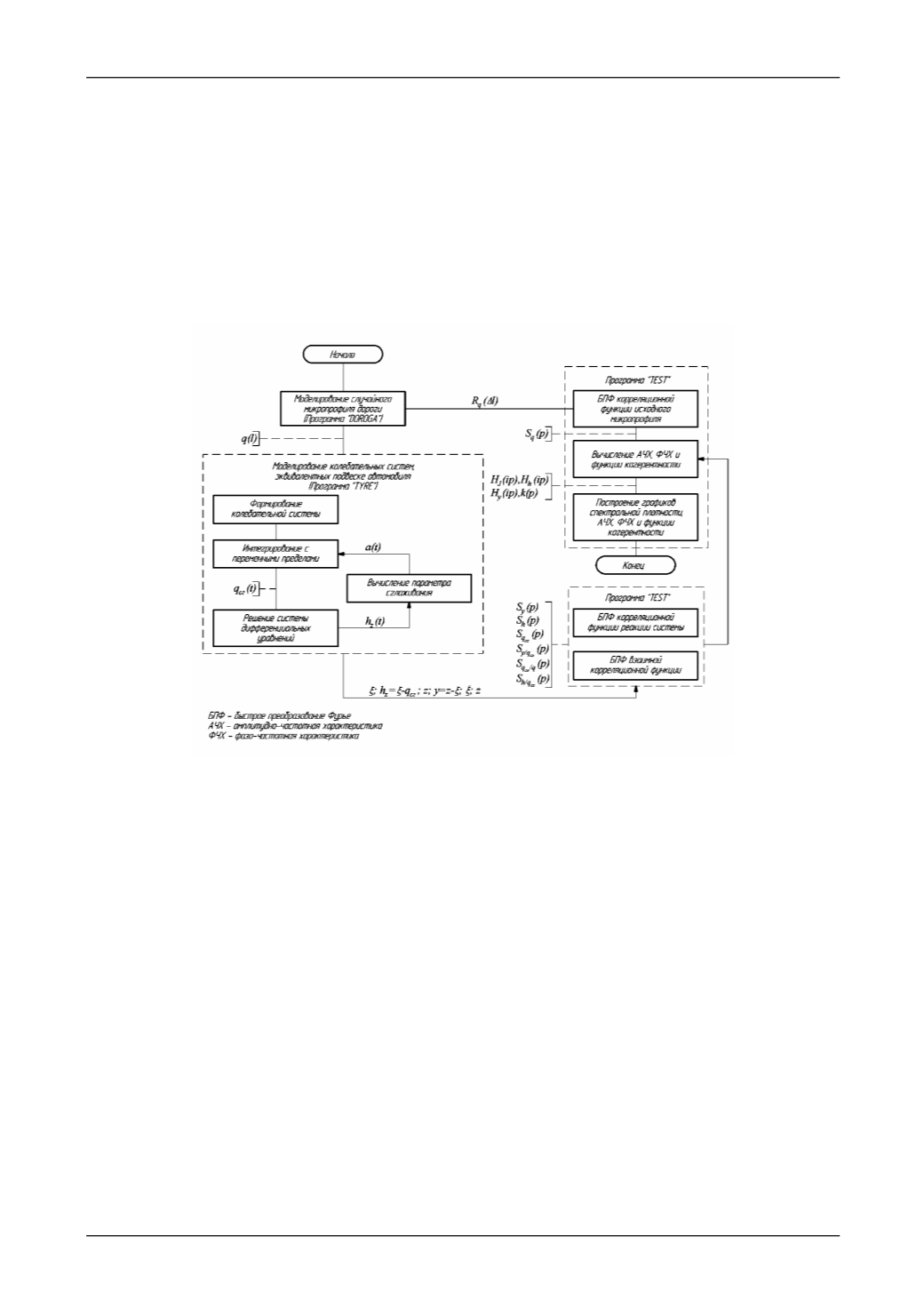
Блок-схема разработанного программного комплекса, получившего название RЕКS,
приведена на рис. 1. Весь комплекс разбит на три блока.
Рис.1. Блок-схема программного комплекса REKS численного моделирования колебательных систем,
эквивалентных подвеске автомобиля
Первый блок "DOROGA" направлен на моделирование случайного микропрофиля до-
роги по заданному виду корреляционной функции, второй "TYRE" - моделирование колеба-
тельных систем, эквивалентных подвеске автомобиля, с учетом эффекта переменного сгла-
живания шины, третий "TEST" - вычисление статистических и частотных характеристик
входных и выходных процессов, звеньев и колебательной системы в целом.
В первом блоке программного комплекса вначале генерируется "белый" шум с еди-
ничной спектральной плотностью, затем строятся характеристики формирующего фильтра,
включая передаточную и импульсную переходную функции, и далее определяются ординаты
искомого микропрофиля. По результатам моделирования микропрофиля проводится оценка
точности и адекватности моделирования путем вычисления коэффициентов множественной
корреляции для корреляционных функций смоделированного и исходного процессов.
Во втором блоке комплекса организован ввод параметров и формирование колеба-
тельной системы подвески. Далее осуществляется смена аргумента функции микропрофиля,
смоделированного в первом блоке, интерполирование микропрофиля на длине отпечатка по-
линомом третьей степени (сплайн-функцией третьего порядка), интегрирование на перемен-
ной длине пятна контакта шины и вычисление производных функции сглаженного микро-
профиля и переменных коэффициентов. Получив реализации производных ординат сглажен-
ного микропрофиля, решается система дифференциальных уравнений методом Рунге – Кутта
четвертого порядка, в результате чего определяется динамический прогиб шины
.
Затем по