















 90 / 397
90 / 397

Механики XXI веку. №16 2017 г.
90
масс за пределы области гарантированной устойчивости, генерирует сигнал опасного сниже-
ния запаса устойчивости и формирует направленное воздействие стабилизирующего харак-
тера для ограничения скоростей или блокирования перемещения технологического оборудо-
вания. Однако, для реализации такой системы требуется большое количество измерительных
приборов и дополнительные гидрораспределители.
Способ управления устойчивостью мобильного грузоподъемного крана [4] предпола-
гает включение датчиков давления в гидролинии выносных опор и заключается в следую-
щем.
1. Осуществляется вычисление грузового момента и сравнивается с предельнодопус-
тимым.
2. В зависимости от полученных данных формируют сигнал включения тех исполни-
тельных механизмов, которые обеспечивают уменьшение грузового момента.
2. Дополнительно измеряются скорости изменения давления в гидроцилиндрах вы-
носных опор и определяется их знак.
4. Составляют контрольные комбинации скоростей изменения давления, которые
сравнивают с эталонными.
5. В зависимости от совпадения или несовпадения полученных контрольных комби-
наций с эталонными формируют сигнал управления параметрами, влияющими на устойчи-
вость.
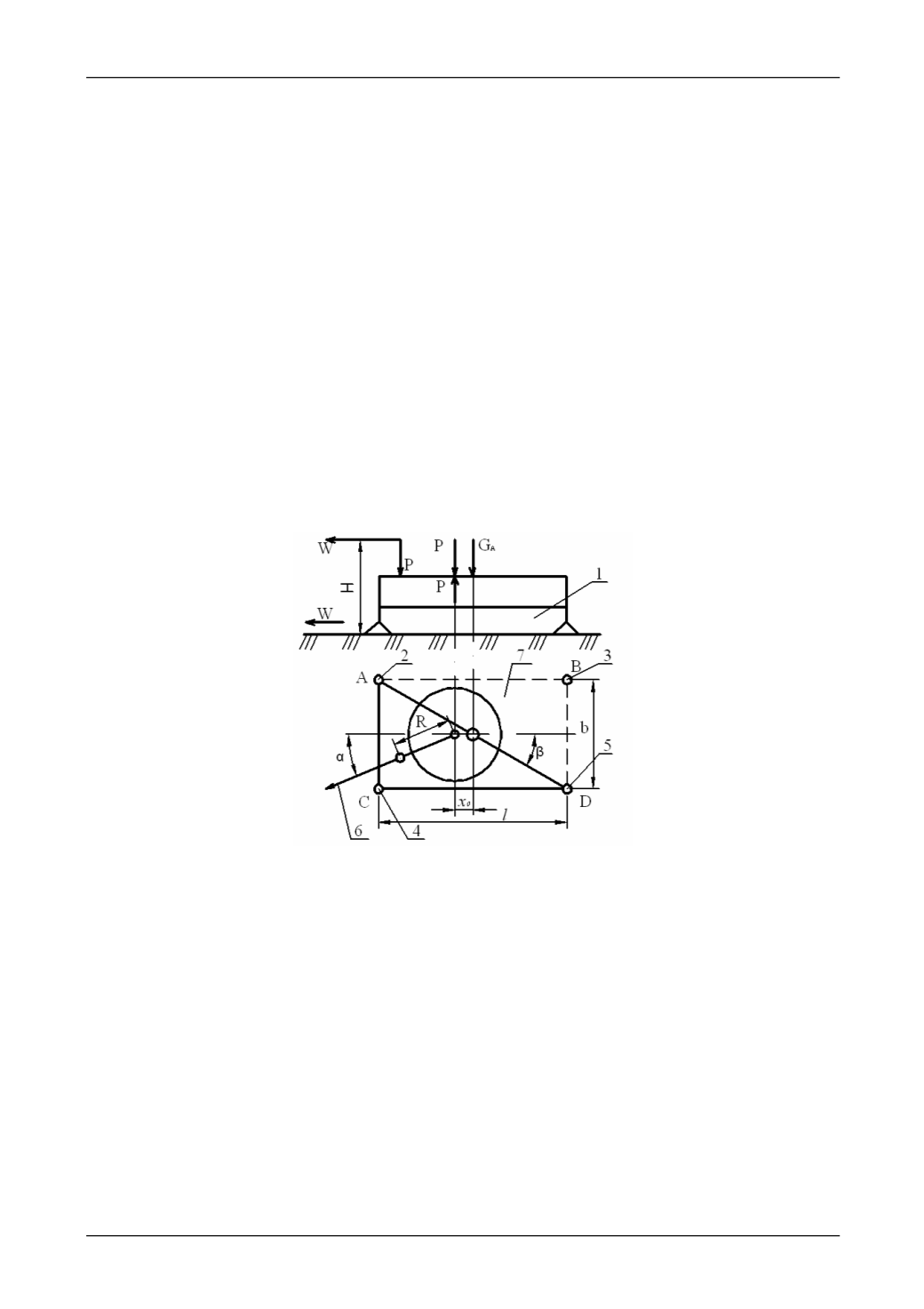
Расчетная схема вычисления грузового момента приведена на рис. 1.
Рис. 1. Расчетная схема опорной плоскости крановой установки:
1 – схема приложения сил; 2, 3, 4, 5 – опорные гидроцилиндры,
воспринимающие основную нагрузку; 6 – телескопическая стрела;
7 – опорный контур
Устройство для осуществления способа управления устойчивостью мобильного гру-
зоподъемного крана содержит гидролинию выносных опор, механизм поворота стрелы, ана-
лого-цифровой преобразователь, бортовой микропроцессор, в память бортового микропро-
цессора введена математическая модель мобильного грузоподъемного крана, выполненная с
возможностью изменения в зависимости от типа грузоподъемной крана. В гидролинию вы-
носных опор дополнительно включены датчики давления, бортовой микропроцессор имеет
связь с датчиками давления, механизм поворота стрелы снабжен регулируемым аксиально-
поршневым гидродвигателем.
После включения главного гидрораспределителя становится возможным включение
гидрораспределителей, с помощью которых создается давление в опорных гидроцилиндрах,
и крановая установка вывешивается, с помощью датчиков давления определяется изменение
давлений
D C B A
PPPP
,
,
,
в полости гидроцилиндров при трансформации опорного контура 7,
при помощи бортового микропроцессора определяется скорость изменения давления.