















 39 / 397
39 / 397

Современные технологии и автоматизация в машиностроении
39
Рис. 1. Интерполяция (слева) и аппроксимация (справа)
2) Сложность. Напрямую зависит от выбранного интерполирующего уравнения – чем
оно проще, тем быстрее вычислить значение интерполирующей функции, заданной этим
уравнением.
3) Непрерывность. Выбор интерполирующего или уравнения в зависимости от необ-
ходимой гладкости кривой.
4) Глобальное или локальное управление. Определение метода интерполирования в
зависимости от нужд пользователя при редактировании значений кривой в ключевых кадрах
– необходимо ли, чтобы при изменении значения в какой-либо ключевом кадре менялась вся
кривая, либо только ее ограниченная область.
Действия над кривыми.
Построение кривой, связанной со значениями параметром в
ключевых кадрах, является только первым шагом в анимации. Скорость, с которой происхо-
дит движение вдоль кривой, зачастую должна быть под контролем аниматора. Прежде всего,
он должен иметь возможность двигаться вдоль кривой значений параметров с постоянным
шагом, после чего он может легко ускорить или замедлить движение. Для движения с посто-
янным шагом требуется установить связь между расстоянием вдоль кривой и значением па-
раметра. Эту связь называют параметризацией длиной дуги пространственной кривой. Для ее
определения используют методы численного интегрирования [49]. После параметризации
пространственной кривой становится возможным управлять скоростью, с которой происхо-
дит движение по кривой. Движение по кривой с постоянной длиной дуги приводит к движе-
нию с постоянной скоростью. Возможности ускорения/замедления могут быть получены при
помощи функций управления скоростью, которые сопоставляют равноотстоящим значениям
параметра (т.е. времени) такие длины дуг, что получается желаемое движение по кривой.
Наиболее распространенным примером такого управления скоростью является движение с
плавным входом/плавным выходом. При таком способе управления скоростью происходит
плавное движение при ускорении объекта из состояния с нулевой скоростью до некоторой,
плавное достижение максимальной скорости и плавное торможение. Для этого функцию
скорости часто выбирают синусоидой.
Движение вдоль кривой.
Различные сложности могут возникнуть при движении
(изменении интересующего параметра) по выбранной кривой с определенной скоростью. Ес-
ли, к примеру, этим параметром является положение трехмерного объекта, а параметриче-
ской кривой – траектория его движения, то необходимо принять во внимание также и ориен-
тацию объекта. Если объект или камера движутся вдоль кривой, то их ориентацию можно
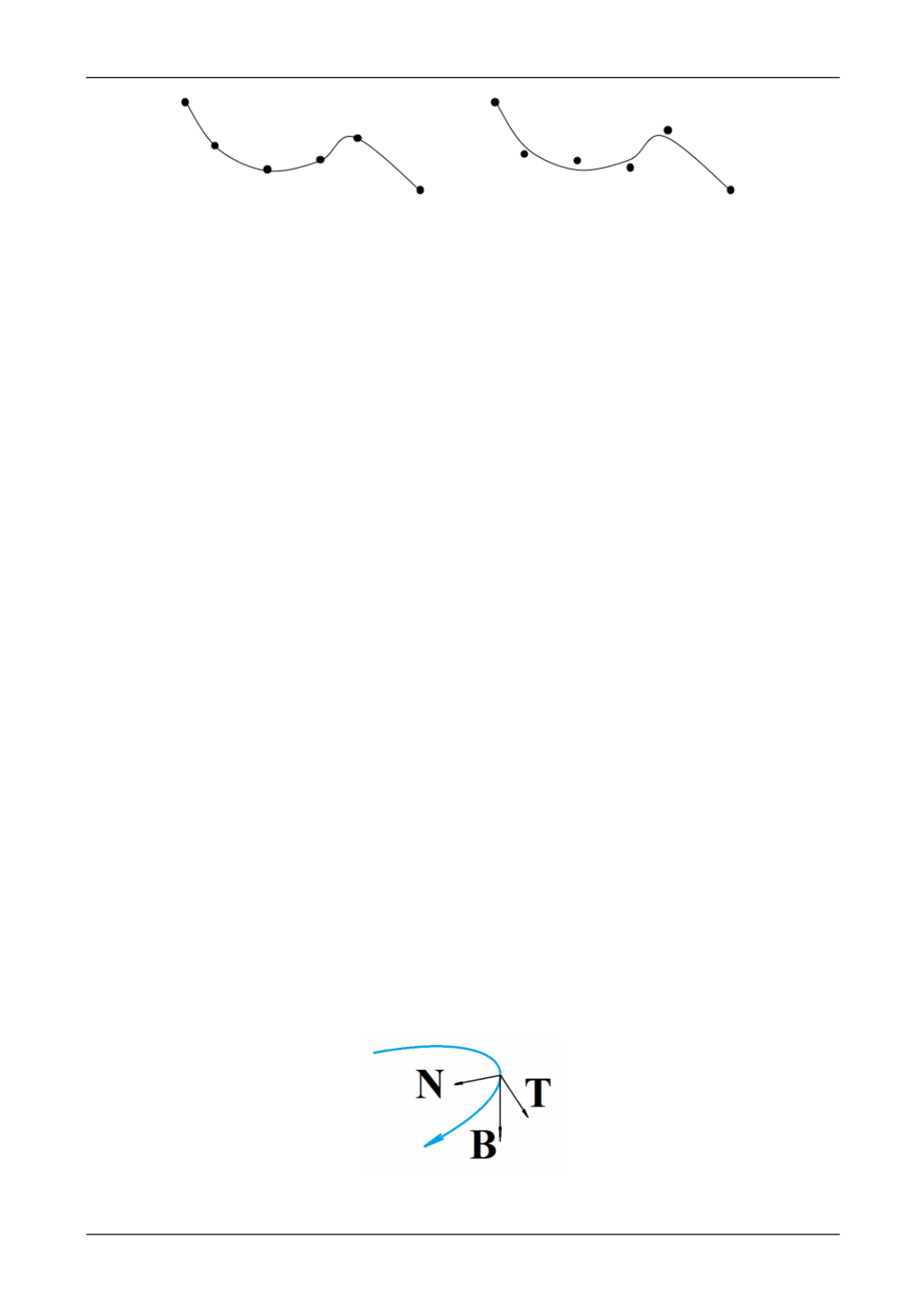
сделать непосредственно зависимой от кривой. Для этого используют рамку Френе, схема
которой изображена на рис. 2. Рамку Френе определяют как движущуюся правостороннюю
координатную систему, задаваемую тремя нормализованными векторами T, N, B, где T –
вектор, обладающий направлением касательной к кривой, B ортогонален к T и имеет направ-
ление второй производной кривой, N является векторным произведением T и B.
Рис. 2. Рамка Френе