















 45 / 397
45 / 397

Современные технологии и автоматизация в машиностроении
45
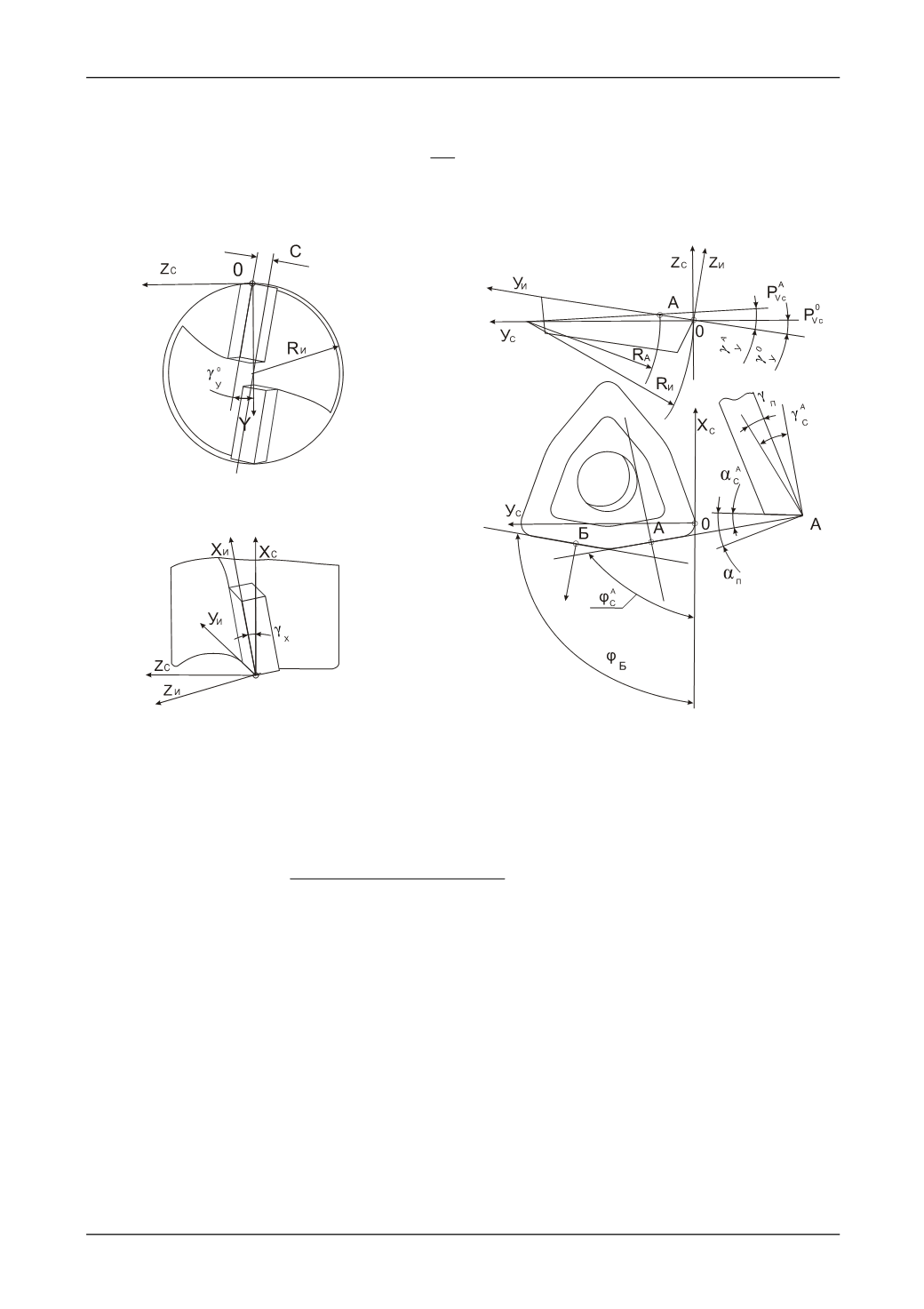
изменится по сравнению с точкой О и профильный угол ориентации СМП для нее опреде-
лится из соотношения:
О
y
А
и
А
y
R
R
sin
sin
,
(1)
где
R
А
– величина радиуса точки
A
(см. рис.2);
R
и
– радиус инструмента.
Рис. 1. Углы γ
y
и γ
x
ориентации
Рис.2. Геометрические параметры
СМП в корпусе сверла
в точке
A
В результате применения векторной алгебры получены следующие выражения для
расчета в точке
A
[2,4]:
- статического угла в плане
x
А
y
А
и
А
y
x
А
с
tg
tg
cos
cos
sin
sin
,
(2)
где
А
и
- инструментальный угол в плане в точке
A
;
-статического угла наклона режущей кромки
А
y
x
А
и
А
y
А
и
А
с
cos
sin
cos
sin
sin
sin
,
(3)
- статического главного переднего угла
)]
cos
cos
(sin
cos
cos
)
cos
cos
(sin
sin
cos
[sin
sin
)
cos
sin
sin
sin
(cos
cos
sin
2
2
А
и
А
и
А
и
А
y
x
А
и
А
и
А
и
А
y
x
x
А
П
А
y
x
А
и
А
y
А
и
А
П
А
с
,
(4)
где γ
п
А
– передний угол на многогранной пластине (см. рис. 2)
- статического главного заднего угла
А
y
x
А
П
А
y
А
и
А
y
x
А
и
А
П
А
с
cos
cos
sin )
sin
cos
cos
sin
(sin
cos
sin
, (5)
где α
п
А
– задний угол на пластине (см. рис.2).