















 167 / 397
167 / 397

Современные технологии и автоматизация в машиностроении
167
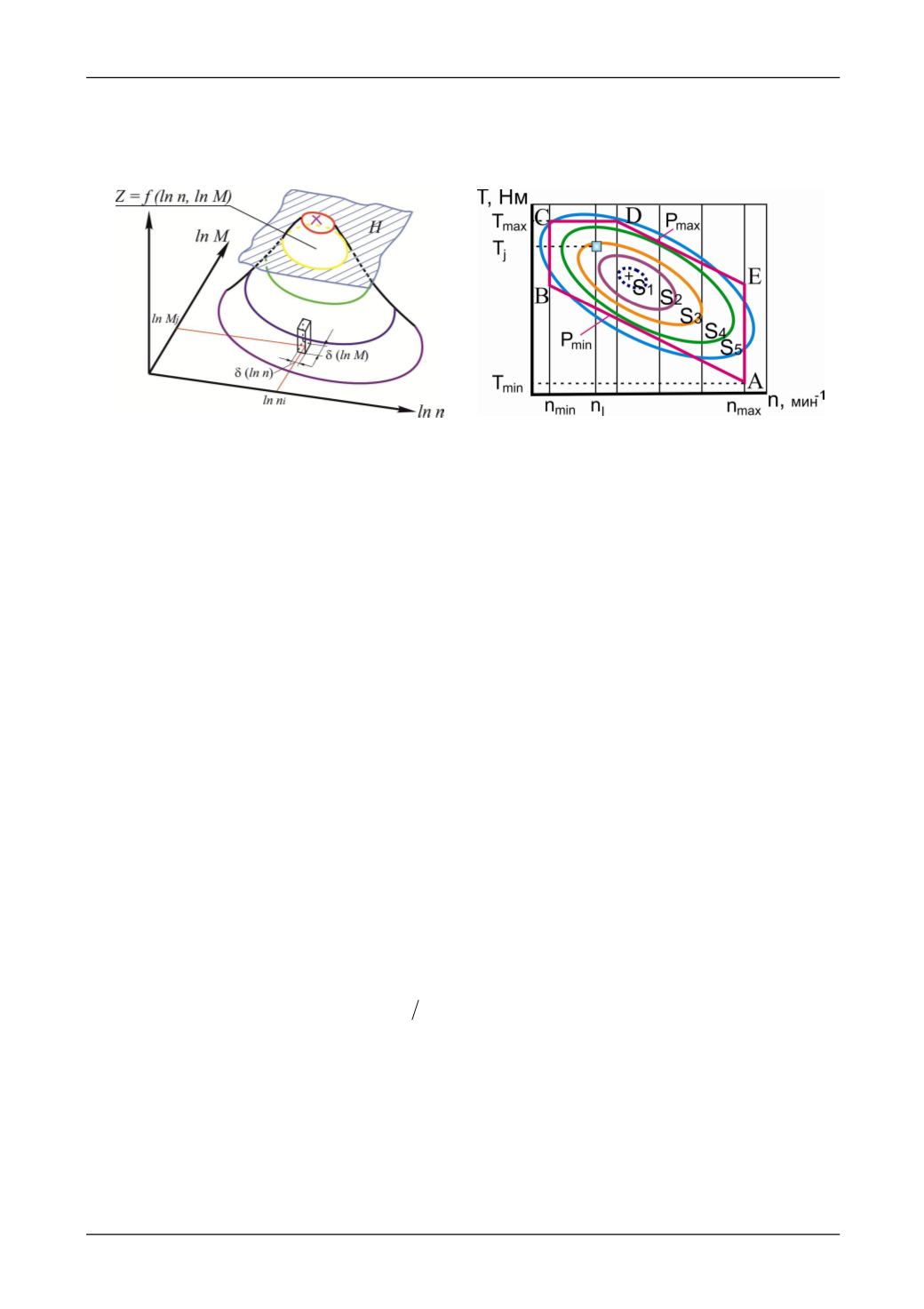
деления эксплуатационных характеристик, представляющая собой семейство линий равной
вероятности (кривых равной плотности) (рис. 2). Данная картина формируется путем сечения
поверхности
f(x, y)
рядом плоскостей, параллельных горизонтальной плоскости, и проециро-
вания полученных кривых на эту плоскость [31-33, 34].
Рис. 1. Поверхность распределения системы эксплуа
Рис. 2. Картина распределения системы
эксплуатационных характеристик станка
Непрерывно интегрируя функцию
f(x, y)
внутри некоторой области
S
, ограниченной
рамками
ABCDE
значений характеристик (рис. 2), можно найти вероятности
p
ij
условий ра-
боты станка для всех сочетаний
n
i
и
T
j
, а также соответствующей им мощности
Р
ij
. При этом
вероятность попадания точки с координатами
x
i
и
y
j
в элементарную область
S
определяет-
ся следующим образом:
S
ij
dxdy yxf
S yx p
,
,
.
(2)
Рассчитанные таким образом значения вероятностей реализации характеристик
n
i
и
T
j
могут служить в дальнейшем для вычисления эквивалентной нагрузки, действующей на лю-
бой вновь разрабатываемый конструктивный элемент привода.
Результаты и обсуждение.
Реализацию предлагаемой методики рассмотрим на при-
мере привода главного движения гибридного металлообрабатывающего оборудования. По-
следовательность проведения моделирования следующая: 1) для практической ценности ана-
лиза выделенную на схеме область
S
разбивают на ряд подобластей (зон)
S
k
, число которых
в общем случае должно быть на единицу больше числа ступеней частоты вращения привода
(в примере
k
= 5; см. рис. 2).
В пределах заданных ограничений каждой из зон последовательно осуществляют по-
иск всего множества возможных сочетаний значений
n
i
и
T
j
:
max
min
,
n n n
i
;
max
min
,
T T T
j
.
Для каждой комбинации этих ограничений вычисляют значение требуемой мощности
Р
ij
и
верифицируют возможность ее исполнения на проектируемом станочном комплексе. Если
значение
Р
ij
оказывается в интервале от
Р
min
до
Р
max
(рис. 2), то по функциональной зависи-
мости (2) определяют вероятность данной комбинации условий для некоторой элементарной
площадки
S
. В тоже время осуществляют вычисления значения требуемого крутящего мо-
мента
T
l
и ожидаемого числа
N
l
циклов нагружения для любого
l
-го элемента привода:
l l
j
l
u T T
;
ij l i
l
pun N
60
,
где
u
l
и
l
- передаточное число и коэффициент полезного действия кинематической
(КПД) цепи привода от
l
-го элемента до шпинделя;
- технический ресурс привода, ч. КПД
привода главного движения гибридного станочного комплекса определяют по методике [35],
предусматривающей разделение потерь энергии на постоянные и переменные составляющие.
Технический ресурс привода устанавливает, как правило, заказчик в техническом задании на
проектирование станка.
Описанный алгоритм повторяется в цикле последовательно по мере возрастания но-
мера зоны до тех пор, пока не будут исследованы все зоны, которые функционально обеспе-