















 106 / 397
106 / 397

Механики XXI веку. №16 2017 г.
106
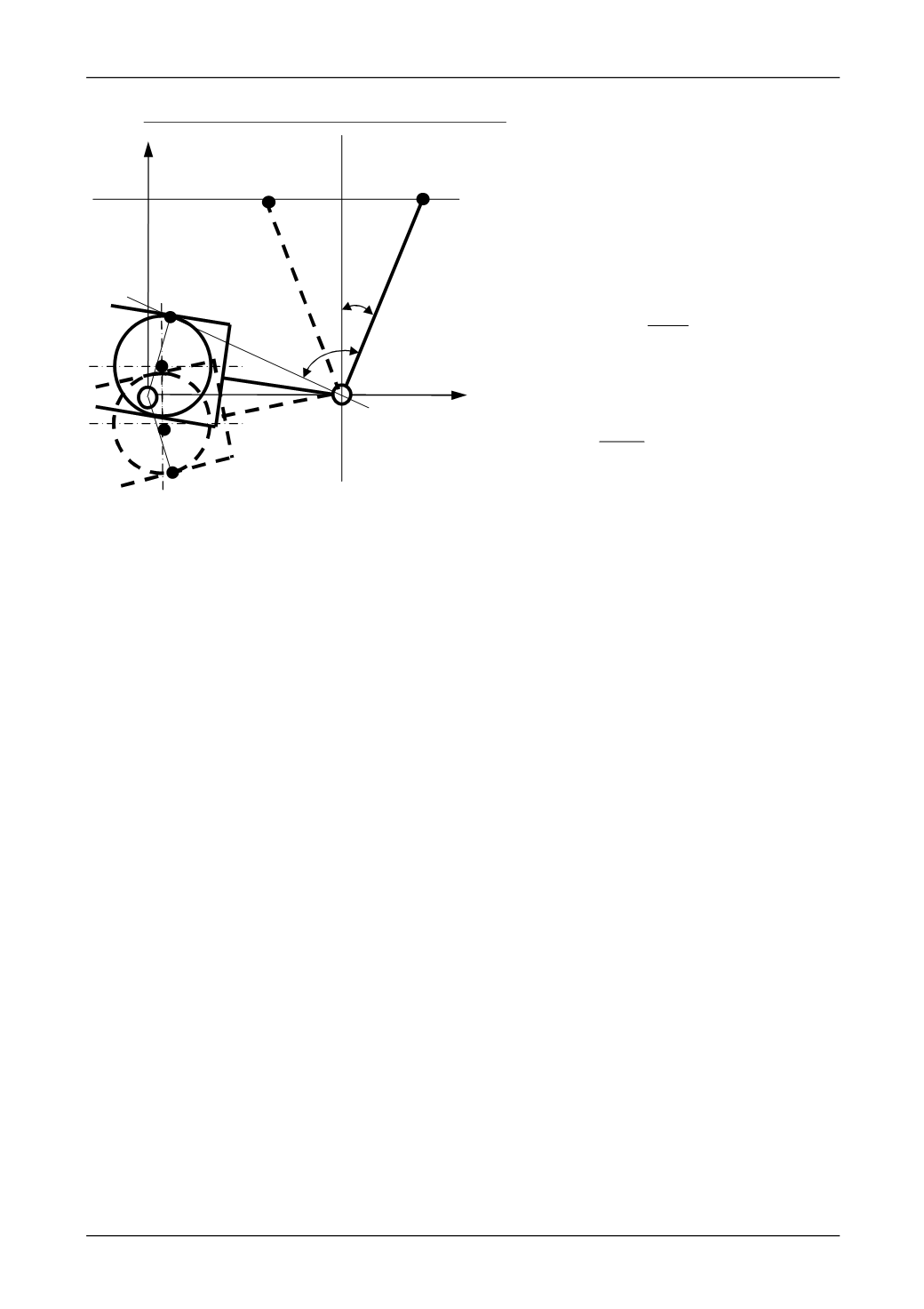
Эксцентриково-рычажный механизм (рис. 4).
Эксцентриково-рычажный меха-
низм синтезирован на основании схемы,
приведенной на рисунке 8 в соответствии
с ходом конечного звена и передаточного
отношения рычагов (
CD
/
DE
).
Угол α, равный 0,145 рад, был оп-
ределен из треугольника
DЕЕ
1
по форму-
ле:
DE
EE
2
arcsin
1
Расстояние
АD
и
АС
определялись
из треугольника
ACD
в соответствии с
выражениями:
cos
CD AD
)(α sin
CD AC
и составили 0,105 м и 0,015 м со-
ответственно, а радиус
AB AC ВС
составил 0,00766 м.
Выводы:
1. Произведен выбор структурных групп Ассура 2-го класса 1-го, 2-го и 3-го видов,
позволивший провести синтез четырех видов механизмов: кривошипно-ползунного, четы-
рехзвенного, кулисного и эксцентриково-рычажного.
2. Проведен геометрический синтез вышеуказанных механизмов, в результате которо-
го были определены их габаритные размеры при крайних положениях конечного звена:
кривошипно-ползунный: по оси
x
составляют 0,110 м, а по оси
y
– 0,030 м.
четырехзвенный: по оси
x
– 0,134 м, по оси
y
– 0,311 м.
кулисный: по оси
x
– 0,135 м, а по оси
y
– 0,208 м.
эксцентриково-рычажный: по оси
x
– 0,135 м, а по оси
y
– 0,208 м.
3. На основании проведенных расчетов установлено, что кривошипно-ползунный ме-
ханизм неприемлем по конструктивным соображениям, а четырехзвенный механизм – из-за
своих габаритов. Одинаковые габариты имеют кулисный и эксцентриковый механизмы, но в
состав последнего входят как низшие, так и высшие пары, что снижает потери на трение, уп-
рощает изготовления, а, следовательно, уменьшает стоимость изделия. С учетом вышеизло-
женного для привода возвратно-поступательного движения экспериментальной установки
был выбран эксцентриково-рычажный механизм.
Литература:
1.
Popescu A. and Olaru D. Kinematics and tribological problems of linear guidance systems in four contact
points // IOP Conference Series: Materials Science and Engineering. 2016. Vol. 147. P. 012029.
2.
Skeeba
V.Yu.Actual Problems and Decisions in Machine Building. Pfaffikon: Trans Tech Publ. 2015.
344 p.
3.
Скиба В.Ю. Актуальные проблемы в машиностроении: сборник материалов первой
международной научно-практической конференции // Хроники объединенного фонда электронных ресурсов
Наука и образование. 2014. № 11 (66). С. 83.
4.
Balancing a high-speed rotor on a balancing machine / Yu.M. Grekov, I.I. Radchik, E.S. Trunin, O.V.
Bol’shakov // Power Technology and Engineering. 2015. Vol. 49, iss. 1. P. 57-60. - doi: 10.1007/s10749-015-0574-6
5.
Proceedings of the 9th IFToMM International Conference on Rotor Dynamics / ed. by P. Pennacchi.
Cham: Springer International Publ., 2015. 2294 p.
Рис. 8. Расчетная схема эксцентриково-рычажного
механизма
A
B
B
1
C
1
C
D
E
E
1
1
1
2
y
x
α
2
90
0