















 104 / 397
104 / 397

Механики XXI веку. №16 2017 г.
104
Целью данной работы является выбор механизма привода возвратно-поступательного
движения рабочего органа экспериментальной установки смесителя. В связи с чем, были ре-
шены следующие задачи: произведен выбор отдельных групп Ассура, позволивший синтези-
ровать четыре вида механизмов, для которых проведен кинематический анализ. По результа-
там исследований осуществлен выбор наиболее рациональной схемы механизма.
Теория.
Анализ литературных источников указывает на то, что наиболее простыми и
надежными являются рычажные механизмы, которые предлагаются для исследования и
применения в конструкции экспериментальной установки смесителя [19-28].
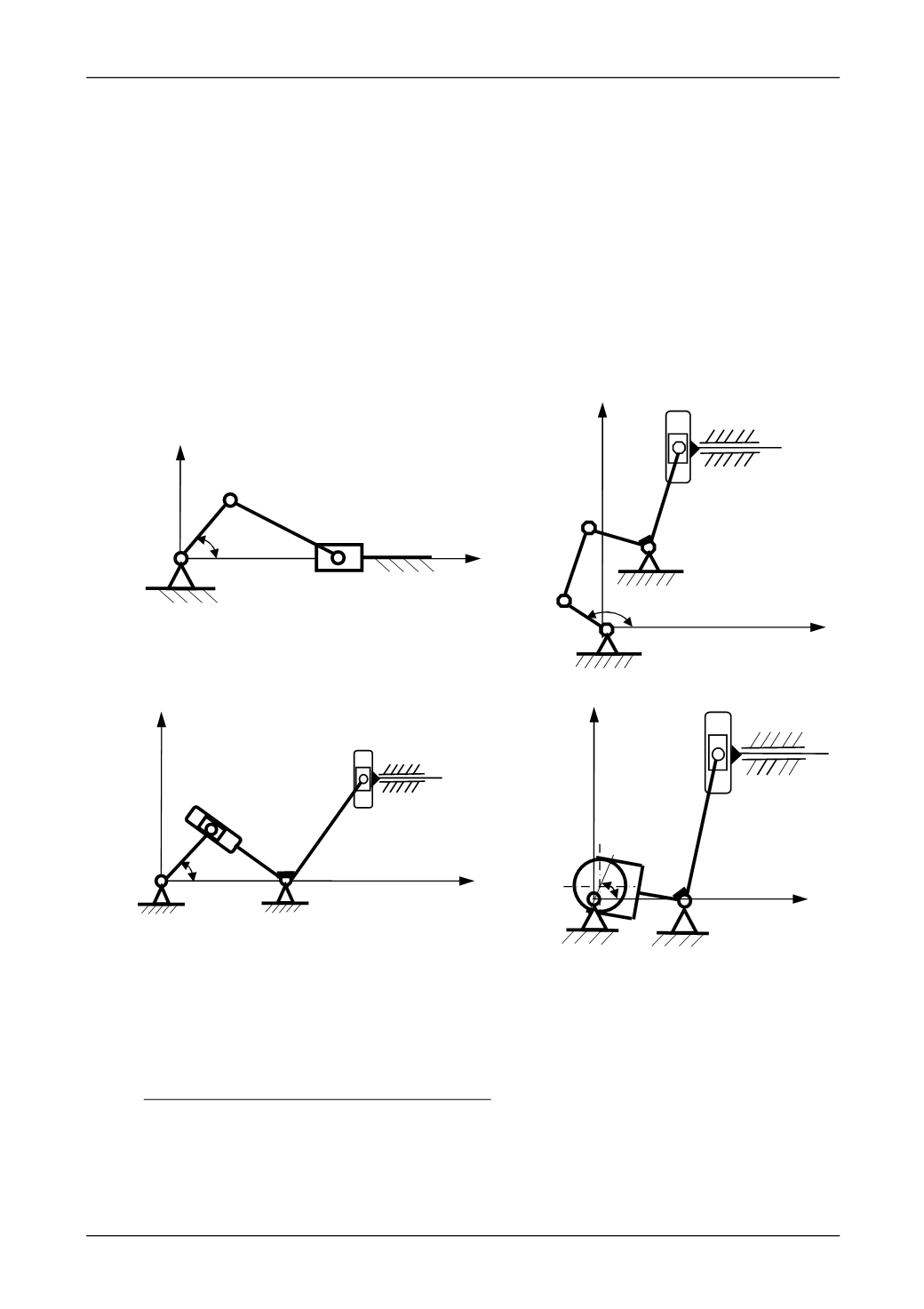
Для выбора кинематической схемы был рассмотрен ряд структурных групп Ассура 2-
го класса 1-го, 2-го и 3-го видов [19]. Из всего многообразия исследованных механизмов бы-
ли выбраны четыре наиболее простые схемы: кривошипно-ползунный, четырехзвенный, ку-
лисный и эксцентриково-рычажный (рис. 1–4).
Они позволяют получить перемещение выходного звена в пределах заданного хода
вдоль оси
x
.
Рис. 1. Структурная схема кривошипно-ползунного
механизма
Рис. 2 Структурная схема
четырехзвенного механизма
Рис. 3. Структурная схема кулисного механизма
Рис. 4. Структурная схема эксцентриково-
рычажный механизма
Результаты и обсуждение
Для определения конструктивных параметров выбранных механизмов проводился
геометрический синтез для каждого из них.
Кривошипно-ползунный механизм (рис. 1).
На основании структурной схемы (рис. 5) и с учетом хода конечного звена (
СС
1
), бы-
ла определена длина кривошипа, которая составила 0,030 м. Размер шатуна, равный 0,080 м,
определялся, исходя из конструктивных соображений и из условия существования механиз-
ма
AB
≤
BC
[19-23].
А
B
C
φ
x
l
1
l
2
y
y
А
С
В
E
D
φ
x
A
x
y
B
φ
D
C
l
1
l
2
l
3
y
x
А
B
C
D
E
l
3
l
2
l
φ