















 105 / 397
105 / 397

Современные технологии и автоматизация в машиностроении
105
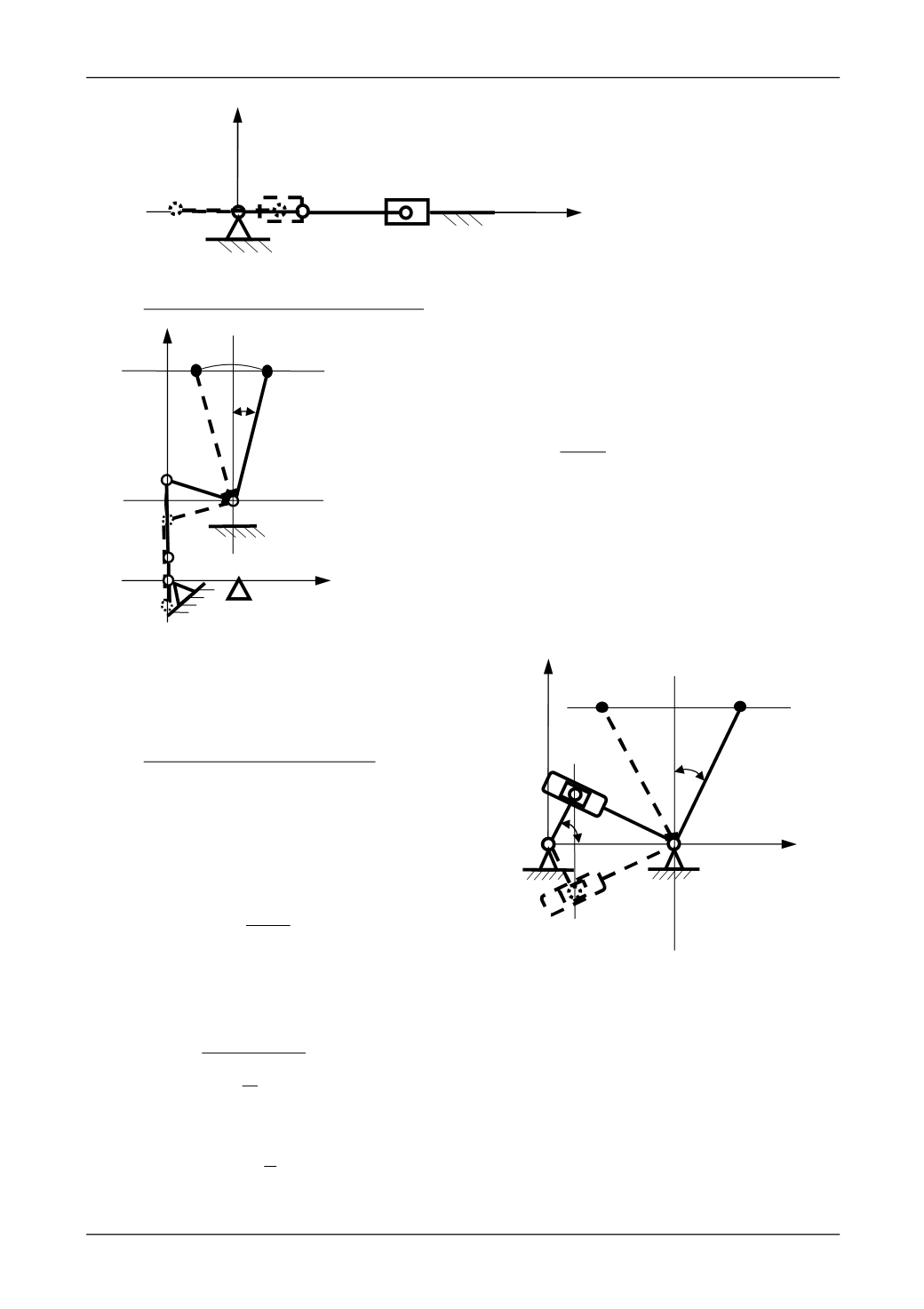
Рис. 5. Расчетная схема для кривошипно-ползунного механизма
Четырехзвенный механизм (рис. 2)
Синтез четырехзвенного механизма выполнялся
на основании хода звена
DE
и передаточного отноше-
ния рычагов
CD
/
DE =
1/2 (рис. 6).
Из треугольника
DEE
1
был определен угол
α
в
соответствии с выражением
DE
EE
2
arcsin
1
его значение составило
α=
0,145 рад.
На основании конструктивных соображений
размер шатуна был принят 0,103 м в соответствии с
условием существования четырехзвенного механизма:
AB
<
BC
<
CD
<
AD
;
AB
+
AD
≤
BC
+
CD
.
Кулисный механизм (рис. 3).
На рисунке 7 представлена расчетная схе-
ма кулисного механизма в соответствии с которой
проведен его синтез с учетом перемещения ведо-
мого звена и передаточного отношения (
ВС
/
СD
).
В результате проведенного синтеза был
определен угол α по выражения:
CD
DD
2
arcsin
1
,
он составил 0,145 рад.
Длина кривошипа АВ, равная 0,015 м, рас-
считывалась на основании формулы:
2
sin
sin
BC AB
Из треугольника
АВС
в соответствии с выражением:
cos
2
cos
BC
AB AC
было определено расстояние между точками
А
и
С,
равное 0,105 м.
Рис. 6. Расчетная схема для
четырехзвенного механизма
Рис. 7. Расчетная схема
кулисного механизма
A
x
y
B
φ
D
C
D
1
B
1
α
1
1
2
2
K
E
1
E
D
C
1
C
B
B
1
1
1
А
x
2
2
3
3
y
α
А
B
y
C
С
1
В
1
x