















 384 / 397
384 / 397

Механики XXI веку. № 16 2017 г.
384
но с содержанием в устройстве сложных элементов, при замене которых необходимо затра-
тить большое количество времени.
Известно быстросъемное устройство (Патент SU 616375). Достоинством захватного
устройства является не трудоемкость и удобство замены рабочего органа, которое достигает-
ся установленным в раме пружинно-гидравлическим замком с запирающей пластиной, кото-
рая зацеплена с ковшом посредством его опорной перекладины. Недостатком этого устрой-
ства является наличие пружинно-гидравлического замка, который может быстро выйти из
строя.
Также известно быстросъемное устройство (Патент FR2657596). Достоинством явля-
ется содержание в устройстве ручного механизма запирания, что позволяет быстро сменить
рабочий орган, путем подъема (опускания) рычага. Недостатком является сложность в изго-
товлении элементов запирания ручного механизма.
Известно быстросъемное устройство (Патент АТ392307). Достоинством устройства
является наличие пружинного замка, который позволяет путем перевода пластины в откры-
тое (закрытое) положение быстро сменить рабочий орган машин. Недостатком является
сложность изготовления элементов запирания и монтирование их на технику.
Однако общим недостатком данных быстросъемных устройств является сложность
изготовления комплектующих элементов их конструкций, а также непосредственного мон-
тажа/демонтажа на базовую машину.
В процессе патентного поиска и последующего анализа быстросъёмных устройств
была найдена конструкция (рис 1) оборудования гидравлического экскаватора (Патент RU
2365712), позволяющая исключить данные недостатки.
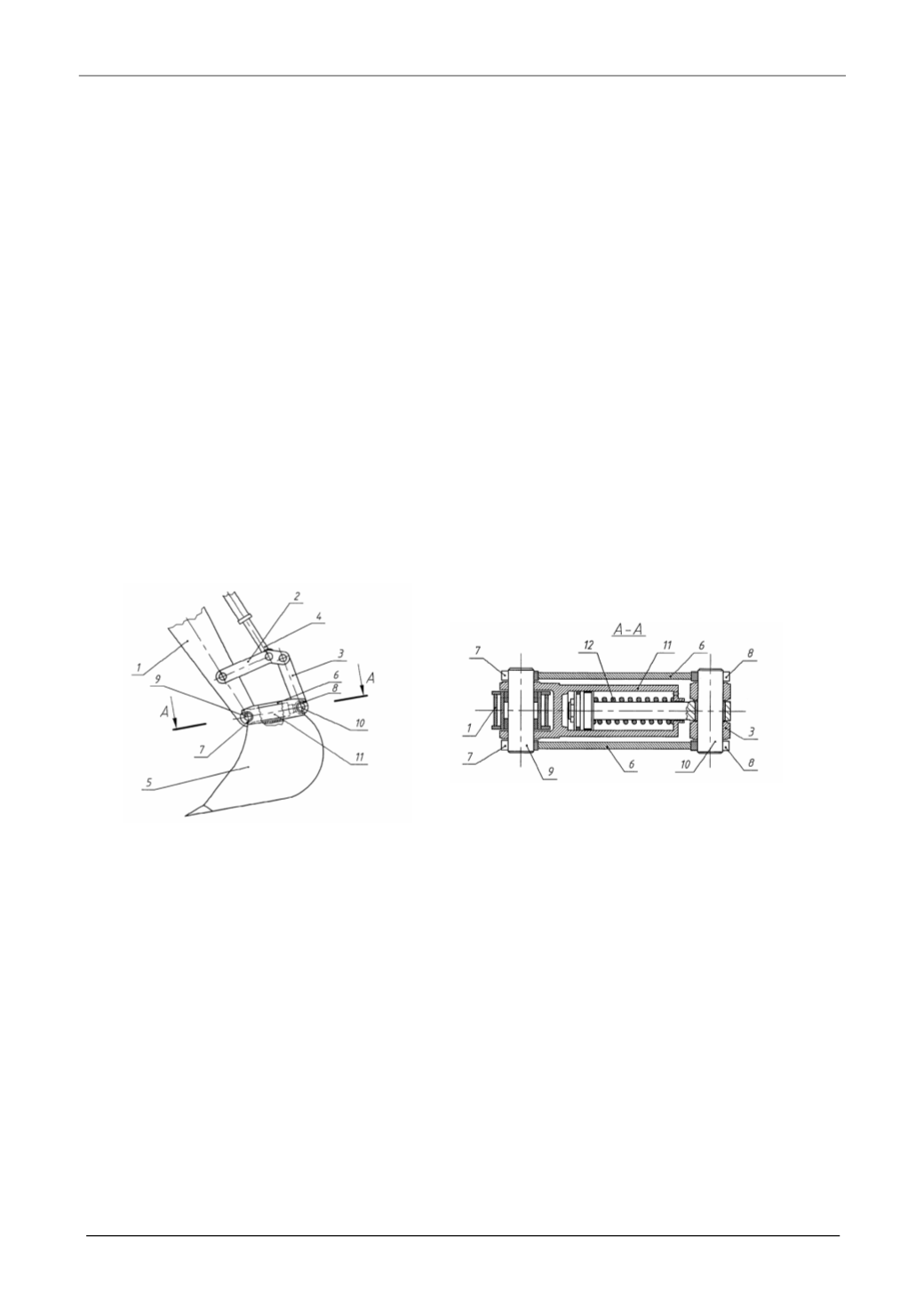
Рис 1. Быстросъемное устройство на экскаватор
Оборудование состоит из рукояти 1 гидравлического экскаватора (рис. 1), поворотно-
го рычага 2, тяги 3, гидроцилиндра 4, ковша 5, на задней стенке которого имеются проушины
6 с зевообразными неподвижными захватами 7,8. При этом на рукояти 1 и свободном конце
тяги 3 закреплены монтажные пальцы 9 и 10, которые соединены между собой при помощи
гидроцилиндра управления 11 с пружиной 12, установленной в его штоковой полости.
Работа быстросъемного оборудования осуществляется следующим образом: соедине-
ния ковша 5 с рукоятью 1 производится в следующей последовательности. Сначала монтаж-
ные пальцы 9 и 10 при помощи гидроцилиндра управления 11 раздвигаются между собой и
заводятся снаружи проушин 6 в зевообразные неподвижные захваты 7 и 8. После чего гидро-
цилиндр управления 11 переводится в сжатое положение и при помощи пружины 12 фикси-
рует захваты 7 и 8 в монтажных пальцах 9 и 10.
Демонтаж ковша 5 с рукояти 1 производится при переводе гидроцилиндра 11 в растя-
нутое положение.
В целом устройство обеспечивает прочную фиксацию рабочего органа, который будет
устанавливаться на машину для земляных работ, в данном случае на экскаватор.